



Drones have become ubiquitous objects flying above our cities. However, it turns out that’s not all they’re capable of. Since as long ago as the 1950s, so-called unmanned underwater vehicles have been capable of navigating in much the same way through water as drones do through air – in recent years, they’ve often been described as underwater drones. The Chinese University of Hong Kong (CUHK) research team combined those two things, and invented a drone that can fly through the air and swim through the water with equal ease.
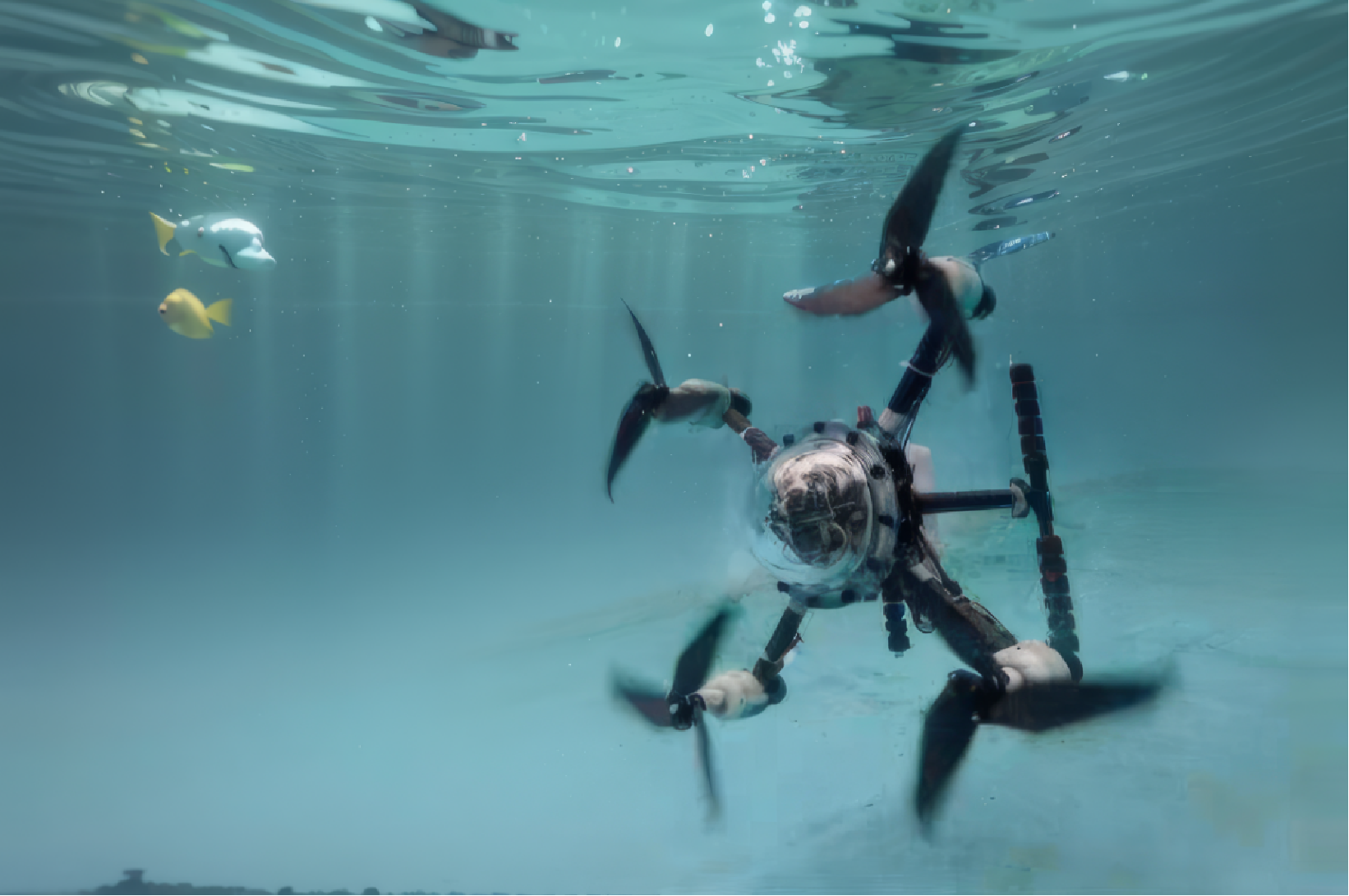
Enter the TJ-FlyingFish, a new amphibious, aerial-aquatic hybrid drone jointly developed by CUHK’s Department of Mechanical and Automation Engineering (MAE) Professor Ben M. Chen and his research team and launched in February 2023. In the air, it looks very much like a standard drone, with four propellers that face upwards and help to keep it in flight. Land it on water, however, and something remarkable happens: those four propellers invert, facing downwards to drag the drone beneath the surface of the water, where it swims around quite happily, driven by a special dual-speed gearbox in each of the arms, which are capable of operating independently. Even more impressively, it can then swim back up to the surface, shake the water off itself and fly back into the air as if it had never been away. There are numerous potential commercial uses of the technology, including aerial and aquatic surveys, remote sensing, search-and-rescue operations and infrastructure inspections.

The TJ-FlyingFish requires no human intervention during its journey. The drone weighs in at 1.63 kilograms. It flies at a fairly standard drone speed of a speed of few metres per second, while it can move up to two metres per second in water, where it is able to dive to a maximum depth of three metres. It can hover for six minutes in the air or move around underwater for about 40 minutes per battery charge.
Professor Ben M. Chen says: “Our ongoing research aims to further enhance the vehicle’s autonomy, with the ultimate goal of achieving fully autonomous missions where the vehicle can operate independently without the need for human oversight or intervention.”

He led a CUHK team on the project that worked in partnership with another team from the Tongji University’s Shanghai Research Institute for Intelligent Autonomous Systems, led by Professor Chen Jie. Professor Chen has been working on projects focused on unmanned aerial systems and unmanned systems technologies since 2003, when he was leading a research team at the National University of Singapore. He first started working on aerial-aquatic hybrid unmanned vehicles back in 2016, when he was still at that university. He joined CUHK in 2018 and soon started working with Professor Chen Jie on the project that would eventually become TJ FlyingFish.

“Recognising the potential and relevance of underwater technology, we have embraced this relatively new domain as an exciting avenue for exploration,” he says. “By leveraging our established expertise in unmanned systems and drawing upon our experience in aerial operations, we are well positioned to delve into the challenges and opportunities presented by underwater environments.”
As you might expect, developing the new drone meant overcoming some challenging technological hurdles, he says. “The hardware design of our aerial-aquatic hybrid platform presented significant challenges, primarily focused on optimising its mechanism for seamless operation both in the air and underwater environments. For example, we have simplified its structure and reduced its weight to ensure it can operate smoothly in water and sky media. Additionally, ensuring the platform’s waterproofing is a critical consideration. Overcoming these hurdles requires meticulous engineering to develop a robust, adaptable design that can withstand the demands of both air and water.”

Another challenge, he adds, is underwater localisation and mapping when the drone is in autonomous mode. “Achieving precise, reliable localisation in an underwater setting poses unique difficulties due to limited visibility, variable currents and the absence of readily available reference points. Developing advanced sensor suites and algorithms capable of accurately determining the vehicle’s position and orientation underwater is crucial for achieving reliable autonomy.”
The drone is still at the prototype stage right now, but the team is currently working on refining its design so that it’s capable of real-world commercial deployment, a process that includes increasing its size and adding additional sensors and payload options, improving its data collection and analysis capabilities. So: expect a visit from the drone of the future soon.