



無人機在城市上空飛翔,但其實它的功能不限於此。早於1950年代,已有「無人機」(俗稱: 水中無人機) 在水中航行。而中大的研究團體將兩者結合為一體,研發了一部既可於空中飛行,又可在水中暢遊的無人機。
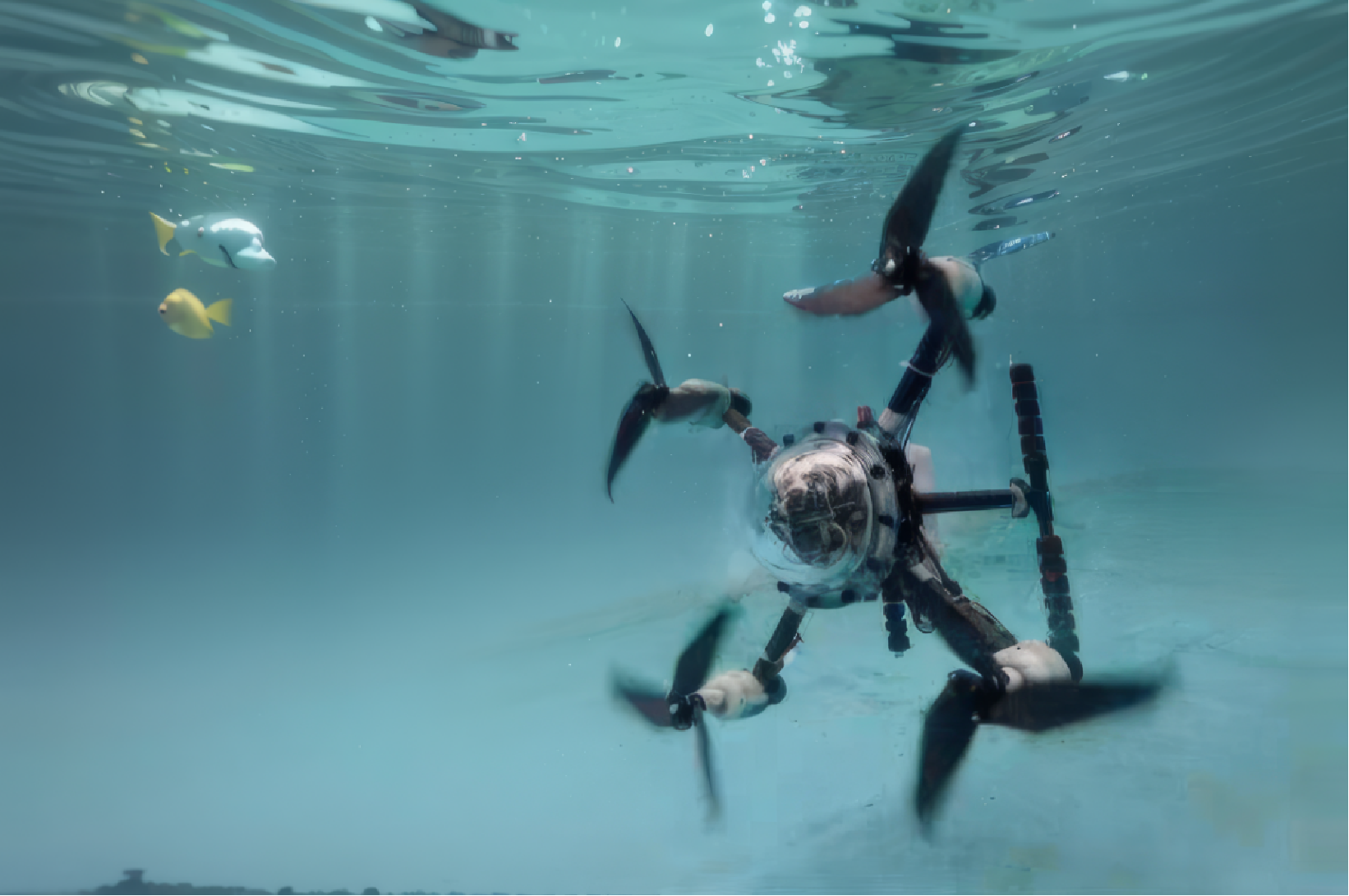
香港中文大學 (中大) 機械及自動化工程學系陳本美教授及其研究團隊研發名為「同濟飛魚」的水空兩棲巡航器原型機,並已於今年2月初發布。在空中飛行時,它看起來和一般無人機無異,有四個螺旋槳朝上,以助於保持飛行。當它降落在水面上時,它的四個螺旋槳反轉,面朝下將無人機拖入水,而每個螺旋槳都裝有特殊的變速箱推進裝置,可以用兩種速度獨立旋轉,讓無人機可以輕鬆地在水中暢遊。更令人驚訝的是,無人機可以飛回水面,自行甩掉身上的水,然後飛回空中。該技術擁有許多潛在的商業用途,包括航空和水中勘測、遙距感應和災難搜救、以及基建安全檢查等。

「同濟飛魚」航行時無須人手操作,其重量為1.63公斤,它與一般的無人機飛行速度相若,即每秒飛數米;在水中的最高速度則為每秒2米,最深可去到水底3米。在充滿電的情況下,可在空中飛行6分鐘,在水中巡游40分鐘。
陳本美教授表示,「我們下一步的研究方向是提高無人機的自主性,最終目標是實現全自動設計,使無人機完全不需要人手監察或干預亦可獨立運行。」

陳教授帶領中大團隊,與同濟大學上海智能自主系統科學中心陳杰教授的另一個團隊開展該合作項目。2003年時陳教授在新加坡國立大學領導一個研究團隊,自那時起便一直致力於無人機系統和無人系統技術的項目。陳教授於2016年起開始研究水空兩棲的無人機,到2018年加入中大後,他便與陳杰教授合作,研發了「同濟飛魚」。

陳本美教授稱,「認識到水下技術的潛力及重要性後,我們將這個相對較新的領域納入研究,通過運用我們在無人系統方面累積的專業知識,以及在航空運行方面的經驗,我們可以借助同濟飛魚去深入探索水下環境帶來的挑戰和機遇。」
陳本美教授續指,「開發這款新型無人機需克服一些具有挑戰性的技術障礙,其中一個成功克服的障礙是無人機的硬件設計,為了確保它能在水空兩個環境中無縫切換地運作,我們在設計時側重優化其硬件設計,包括簡化了無人機的結構及減低重量,保證它在水空介質中都能順暢運行。此外,確保機件防水也是一個關鍵的設計。要克服這些障礙,需要精心的工程設計,以開發出一部堅固、適應性強,能夠承受水空跨域航行的無人機。」

陳教授表示,無人機在下自動運行模式下,在水中的定位是另一挑戰,「由於水中的能見度有限、水流多變以及缺乏現成的參考特徵,種種因素導致要在水下環境中進行精確、可靠的定位會更困難。如果要做到準確知道無人機於水下的位置及方向,開發先進的傳感器套件和演算法是至關重要。」
「同濟飛魚」無人機目前處於試驗階段,研究團隊仍在努力完善其設計,使其能夠運用於各個領域。需要改善的地方包括加大機身尺寸、添加額外的傳感器和有效載荷選項,以提高其數據收集和分析能力。讓我們拭目以待「同濟飛魚」在不少領域執行任務。