



在自然界,不難看見動物結隊躲避天敵或捕食獵物的集群行為,猶如有指揮官在背後發放指令。香港中文大學(中大)機械與自動化工程學系張立教授的團隊多年來一直致力研發醫療微型機械人,受此啟發,他聯同計算機科學與工程學系竇琪教授合作研發了一套微型機械人集群自動導航系統技術,結合人工智能,讓機械人擁有自主導航能力。它更會如蜜蜂般成群結隊工作,並因應體內環境自動改變隊形,於人體內遊走進行針對性的治療。
現時微型機械人大多以個體模式行動,優點是體積細小,但容量有限,每次只能輸送有限藥物,要運載更多的份量,只有增加機械人的數量。但另一問題是人體內盡是蜿蜒曲折的腔道、流動的液體,很難實時控制成千上萬個機械人同步執行任務。縱使可以利用外部磁場引領機械人,或以硬件作實時導航及定位配合來控制機械人的行動,但都難免出現機械人失誤或不受控的情況。
人工智能系統發號施令
為了增加微型機械人集群的「智力」,穩定地執行任務,研究團隊結合過去多年研究微型機械人的經驗,利用深度學習技術,建立一套人工智能微型機械人操控系統,增加機械人的自主運算及決策能力。張教授表示:「我們集結了專業人員操作機械人的經驗及知識去訓練智能系統,賦予微型機械人集群的自主巡航能力,以助減少任務失誤的機會。」

團隊設計的自動導航系統/深度學習系統Deep Neural Networks (DNN)可以按體內環境實時運算出機械人的分布、移動軌跡、磁場、機械人群體的中心點及目標位置等參數,讓微機械人懂得因應不同環境而適時調整集群行動,按照精準的計劃路線完成任務。團隊亦按照人體內不同情境設定,如靜態或動態環境,將微機械人的自主程度分成五個級別;級別愈高,要求手動控制的部分愈少。操作人員可按需要及實際情境選擇機械人的自主模式。
級別0類近現時大多數微型機械人的操作方式,機械人集群全以人手導航,操作人員必須接受充足的訓練,了解機械人的物理狀態,以及熟悉系統的操作。硬件上,亦需全程以光學顯微鏡等成像工具實時監察機械人的行動,同步計劃及控制它們的集群形態、路線與目標位置等,避免機械人碰上障礙物。不過,人手操作容易存在誤差,控制不良或會令微機械人集群偏離航道或分裂。
級別4的機械人集群可以做到全自主狀態,能在複雜多變的動態環境中執行醫療任務。例如任務是將標靶藥物輸送到病灶,系統會自動及實時搜尋目標位置、規劃航道及機械人的集群形態,直至完成任務。如感應到前方有障礙物,也能迅速重新規劃航道,過程中無須人手介入,能減省訓練專業操作員的成本。

為了測試微型機械人集群在人工智能導航系統下的運作情況,研究團隊與威爾斯親王醫院合作在人類胎盤樣本進行體外實驗,結果顯示導航系統能有效在血管這類複雜的體內動態環境和微小且曲折的管道內為機械人集群導航。
張教授期望:「隨著自動導航系統技術的發展愈趨成熟,我們希望此人工智能控制系統可讓醫生在無需接受特別操作培訓下,利用微型機械人集群為病人進行無創或微創治療,特別是在深入體內的曲折狹小腔體內。」
自主組成不同隊形

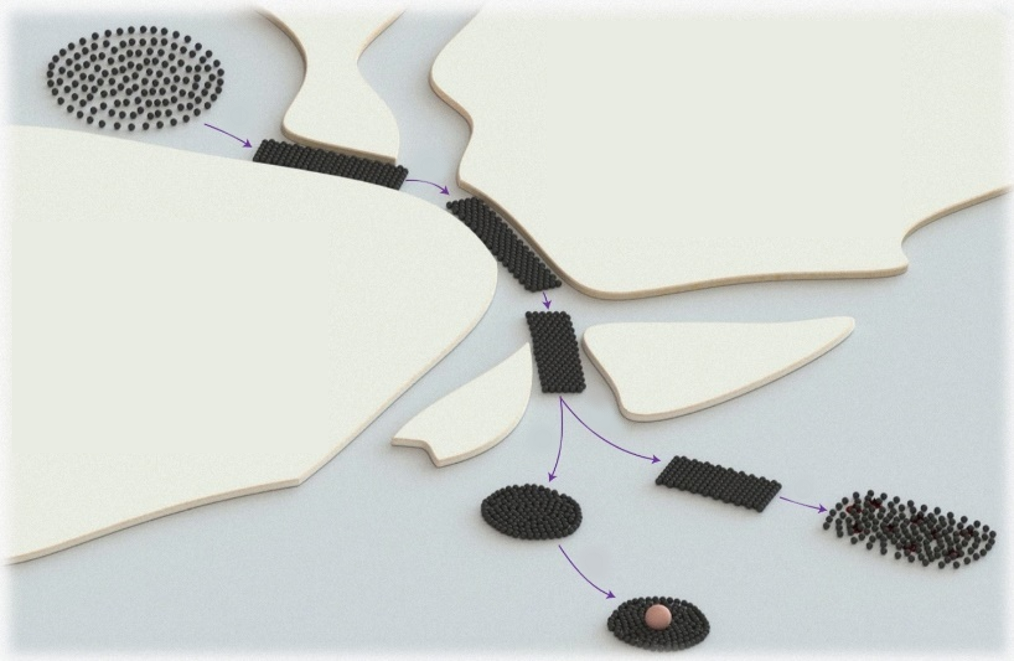
微型機械人由磁性納米粒子組成,直徑只有400納米,相等於約千分之五條頭髮直徑的尺度。系統可以利用指定磁場引導一大群機械人轉換成三種不同的集群形態,包括擴散群(spreading swarm,SS)、帶狀群(ribbon-like swarm,RS)及渦狀群(vortex-like swarm,VS),以執行不同任務,包括於目標位置進行靶向治療、藥物輸送等。團隊期望這種結合人工智能的導航技術,日後能應用於治療大腦缺血性中風等血管性系統疾病,並且比現有標靶藥更精準地運送藥物到癌細胞。

研究結果已刊登於國際學術期刊《Nature Machine Intelligence》,全文請參閱:https://www.nature.com/articles/s42256-022-00482-8。



